使用轴位置来控制触发数位输出的开关。当轴达到特定的位置,开关即开启或关闭,开关可透过轴向前或向后移动的方向来控制。
命名空间:IntervalZero.KINGSTAR.Base.Api组合: IntervalZero.KINGSTAR.Base.Api (于 IntervalZero.KINGSTAR.Base.dll) 版本:4.4.0.0
语法
KsCommandStatus SetAxisCamSwitch(
int Index,
McCamSwitch[] Switches,
McOutput[] Outputs,
McTrack[] Tracks,
uint EnableMask,
McSource ValueSource
)Function SetAxisCamSwitch(
Index As Integer,
Switches As McCamSwitch(),
Outputs As McOutput(),
Tracks As McTrack(),
EnableMask As UInteger,
ValueSource As McSource
) As KsCommandStatus参数
Index [in]
型别:int
轴索引。索引以 0 为起始;别名将影响此参数。
Switches [in]
型别:McCamSwitch[]
控制切换动作。轨道编号需要按顺序排列。
Outputs [in]
型别:McOutput[]
选择对应轨道所控制的数位输出。
Tracks [in]
型别:McTrack[]
在轨道的开关上增加补偿时间和迟滞。TrackNumber 定义在 Switches 中。
EnableMask [in]
型别:uint
启用不同轨道。此参数为 bool(32 位元),当 bool 值设为 1 时将启用轨道阵列中相应的轨道。
ValueSource [in]
型别:McSource
定义轴值的来源;例如:位置;参见 McSource。
- mcCommandedValue, mcSetValue – 同步设定值。建议使用此设定。
- mcActualValue – 同步实际值。此设定可能不稳定。
回传值
回传 KsCommandStatus 类别。
备注
- McCamSwitch 为供应商特定的类别,用于定义数位凸轮的开关。
- McOutput 为供应商特定的结构,用于连接至(实体)输出,若使用的是您个人的伺服驱动器的数位输出 (DO),需在 IApi.Start 前使用 IApi.EnableAxisOutput。
- McTrack 为供应商特定的结构,含有轨道属性,例如:每个轨道的补偿时间(轨道是一个输出的一组开关),亦可包含输出的引用。
- 此功能有时被称作 PLS – 阶段、位置或可编程极限开关。
- 当模数轴启用时,模数值会套用至 McCamSwitch 中的 FirstOnPosition 与 LastOnPosition。为了避免潜在问题,建议将 FirstOnPosition 与 LastOnPosition(补偿后)放在同一区段内,且不跨越模数边界(请参阅范例 1)。
- 范例 1(建议):假设模数值设为 360。
轴速度: 180
OnCompensation: 0
OffCompensation: 0
FirstOnPosition: 210
LastOnPosition: 340 - 范例 2 (不建议):假设模数值设为 360。最终的 first-on 位置将为 300 (210 + 0.5 * 180),最终的 last-on 位置将为 70 ((340 + 0.5 * 180) % 360),此即跨越模数边界(从 300 到 70)。
轴速度: 180
OnCompensation: 0.5
OffCompensation: 0.5
FirstOnPosition: 210
LastOnPosition: 340
- 范例 1(建议):假设模数值设为 360。
McCamSwitch 类别中的元素
| B/E | 参数 | 型别 | 说明 |
|---|---|---|---|
| B | TrackNumber | INT | 轨道索引,索引以零为起始。 |
| B | FirstOnPosition [使用者单位] | LREAL | 开关开启的位置。 |
| B | LastOnPosition [使用者单位] | LREAL | 开关关闭的位置。 |
| E | AxisDirection | INT |
轴方向,预设值为零。若选择一或二,开关仅在当轴朝指定方向移动时才会启动。 双向:0;正向:1;负向:2。 |
| E | CamSwitchMode | INT |
凸轮开关由轴的位置或时间控制,预设值为零。若选择位置,需进一步设定 FirstOnPosition 与 LastOnPosition;若选择时间,需进一步设定 FirstOnPosition 与 Duration。 位置:0;时间:1。 |
| E | Duration | TIME | 开关开启的时长,此功能在 CamSwitchMode 选择为时间时可用,单位:秒。 |
McTrack 类别中的元素
| B/E | 参数 | 型别 | 说明 |
|---|---|---|---|
| E | OnCompensation | TIME | 在每个轨道的切换点前或后开启开关(上升边缘)的补偿时间。若值为正,则开启将延迟;若值为负,则将提前开启。 |
| E | OffCompensation | TIME | 在每个轨道的切换点前或后关闭开关(下降边缘)的补偿时间。若值为正,则关闭将延迟;若值为负,则将提前关闭。 |
| E | Hysteresis [单位] | LREAL | 在轴离开该区域之前,从开关未打开或未关闭的切换点(正向和负向)的距离。此可避免在开关点附近频繁切换。 |
此凸轮定义具有起点与终点,如此使用者可定义每一个凸轮的 FirstOnPosition 与 LastOnPosition(或时间),此函式类似机械凸轮,但具有额外的优点,您可为输出设置一个特定时间,并设定时间补偿和迟滞。
CamSwitchMode:可为位置或时间。
Duration:时长,凸轮开启的输出时长,时间补偿 (OnCompensation 与 OffCompensation) 可为正或负值,负值表示输出在开关位置到达前即变更。
Hysteresis:此参数可避免轴在切换点附近及实际位置在切换位置附近抖动时,输出不断切换的现象。Hysteresis 是 McTrack 的一部分,表示每个轨道都可设定不同的迟滞。
McCamSwitch 之范例
| 参数 | 型别 | 开关 01 | 开关 02 | 开关 03 | 开关 04 | ... | 开关 N |
|---|---|---|---|---|---|---|---|
| TrackNumber | INTEGER | 1 | 1 | 1 | 2 | ||
| FirstOnPosition [单位] | LREAL | 2000 | 2500 | 4000 | 3000 | ||
| LastOnPosition [单位] | LREAL | 3000 | 3000 | 6000 | -- | ||
| AxisDirection | INTEGER | 1=正向 | 2=负向 | 0=双向 | 0=双向 | ||
| CamSwitchMode | INTEGER | 0=位置 | 0=位置 | 0=位置 | 1=时间 | ||
| Duration | LREAL | -- | -- | -- | 1.35 秒 |
McOutput 之范例
| 参数 | MC_OUTPUT[0] | MC_OUTPUT[1] | MC_OUTPUT[2] | - | - | - | MC_OUTPUT[31] |
|---|---|---|---|---|---|---|---|
| IsAxis | FALSE | FALSE | FALSE | - | - | - | FALSE |
| Index | 0 | 0 | 0 | - | - | - | 0 |
| BitOffset | 0 | 1 | 2 | - | - | - | 31 |
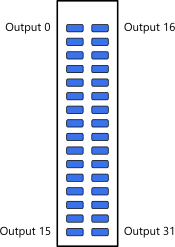
I/O 模组之范例
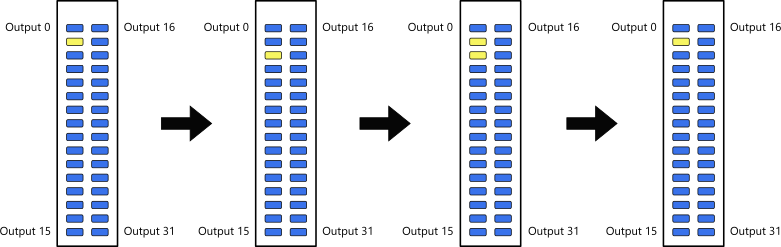
下图使用了上例 McCamSwitch 的值,不使用 On/OffCompensation 与 Hysteresis,此为当轴持续朝正向移动时的输出行为。
SetAxisCamSwitch – 正向

正向:输出行为
TrackNumber 1(开关 01, 02, 03)匹配到 McOutput[1];TrackNumber 2(开关 04)匹配到 McOutput[2]。当开关 01、开关 02、开关 03 被触发时,第一个 I/O 模组(索引 0)上的第二个输出(输出 1)即被开启。当开关 04 被触发时,第三个输出(输出 2)即被开启。
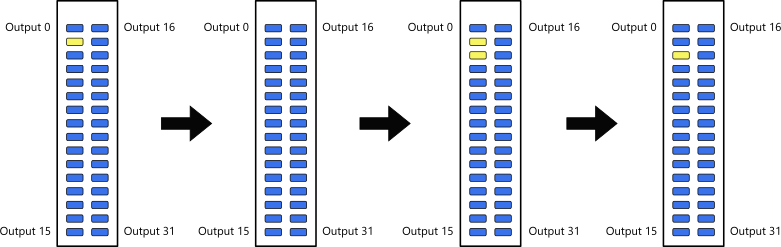
On/Off 补偿之范例
以下范例使用 OnCompensation -125ms 与 OffCompensation +250ms。

下图为当轴持续朝负向移动,且不使用 On/OffCompensation 与 Hysteresis 时的输出行为。
SetAxisCamSwitch – 负向

负向:输出行为
EnableMask
EnableMask 是一个含有 32 位元的 uint32 参数,每个位元都是一个 bool 值,可控制输出。输出可透过将相应的位元设为 TRUE 或 FALSE 来启用或停用,例如位元 0 控制 McOutput[0];位元 1 控制 McOutput[1],若位元 0 和位元 1 都设为 TRUE,其输出即被启用,意即当相对应的开关被触发时,其输出即被开启。若位元 0 和位元 1 都设为 FALSE,其输出即被停用,即使相对应的开关被触发时,其输出也不会被开启。
| 位元 | 位元 0 | 位元 1 | 位元 2 | 位元 3 | - | - | - | - | 位元 31 |
|---|---|---|---|---|---|---|---|---|---|
| 值 | TRUE/FALSE | TRUE/FALSE | TRUE/FALSE | TRUE/FALSE | - | - | - | - | TRUE/FALSE |
McOutput 之范例
| 参数 | MC_OUTPUT[0] | MC_OUTPUT[1] | MC_OUTPUT[2] | - | - | - | MC_OUTPUT[31] |
|---|---|---|---|---|---|---|---|
| IsAxis | FALSE | FALSE | FALSE | - | - | - | FALSE |
| Index | 0 | 0 | 0 | - | - | - | 0 |
| BitOffset | 0 | 1 | 2 | - | - | - | 31 |
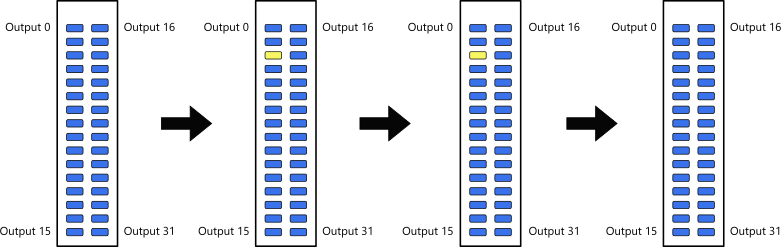
EnableMask 位元之范例 1
位元 0、1、2 为 TRUE,意即输出 0、1、2 被启用,当相对应的开关被触发时,输出即被开启。
| 位元 | 位元 0 | 位元 1 | 位元 2 | 位元 3 | - | - | - | - | 位元 31 |
|---|---|---|---|---|---|---|---|---|---|
| 值 | TRUE | TRUE | TRUE | FALSE | FALSE | FALSE | FALSE | FALSE | FALSE |
正向:输出行为
EnableMask 位元之范例 2
位元 0、2 为 TRUE,意即输出 0、2 被启用,当相对应的开关被触发时,仅有这 2 个输出会被开启。
| 位元 | 位元 0 | 位元 1 | 位元 2 | 位元 3 | - | - | - | - | 位元 31 |
|---|---|---|---|---|---|---|---|---|---|
| 值 | TRUE | FALSE | TRUE | FALSE | FALSE | FALSE | FALSE | FALSE | FALSE |
正向:输出行为
EnableMask 位元之范例 3
所有位元均为 FALSE,意即所有输出均停用,即使相对应的开关被触发时,输出也不会被开启。
| 位元 | 位元 0 | 位元 1 | 位元 2 | 位元 3 | - | - | - | - | 位元 31 |
|---|---|---|---|---|---|---|---|---|---|
|
值 |
FALSE | FALSE | FALSE | FALSE | FALSE | FALSE | FALSE | FALSE | FALSE |
正向:输出行为
范例
N/A参见